I’m a research scientist excited about equipping embodied agents with greater understanding of the worlds they inhabit with us. I am especially interested in building and using 3D representations for embodied intelligence and am excited about working at the intersection of robotics and machine learning.
I have a PhD in Aeronautics and Astronautics from MIT. During my graduate studies, I conducted research with the Robust Robotics Group at MIT’s Computer Science and Artificial Intelligence Laboratory, advised by Dr. Nicholas Roy. My thesis focusing on navigation and estimation in GPS-denied environments of size, weight, and power constrained vehicles. Before that, I obtained my B.S. in Mechanical Engineering from the University of California, San Diego.
Recent News
May 2024: Recursive Field Networks for Cross-Modal Multi-Scene Representations accepted to SIGGRAPH 2024
July 2023: NeO 360 accepted to ICCV 2023
NeO 360: Neural Fields for Sparse View Synthesis of Outdoor ScenesFebruary 2023: Two papers accepted to CVPR 2023:
CARTO: Category and Joint Agnostic Reconstruction of ARTiculated Objects and
Multi-Object Manipulation via Object-Centric Neural Scattering FunctionsSeptember 2022: Our paper ROAD: Learning an Implicit Recursive Octree Auto-Decoder to Efficiently Encode 3D Shapes has been accepted to CoRL 2022. [twitter thread]
June 2022: I joined the Toyota Research Institute as a Machine Learning Research Scientist.
Hi there!

Selected Publications
Below are a few selected publications. For more, check out my Google Scholar.


Object-Level SLAM for Autonomous Navigation
Robust Object-Based SLAM for High-Speed Autonomous Navigation (ROSHAN) improves object-level SLAM with ellipsoid landmarks for autonomous navigation by incorporating texture and semantic measurements. [pdf]
Ok, K.*, Liu, K.*, Frey, K., How, J. P., & Roy, N. Robust object-based slam for high-speed autonomous navigation. ICRA 2019.
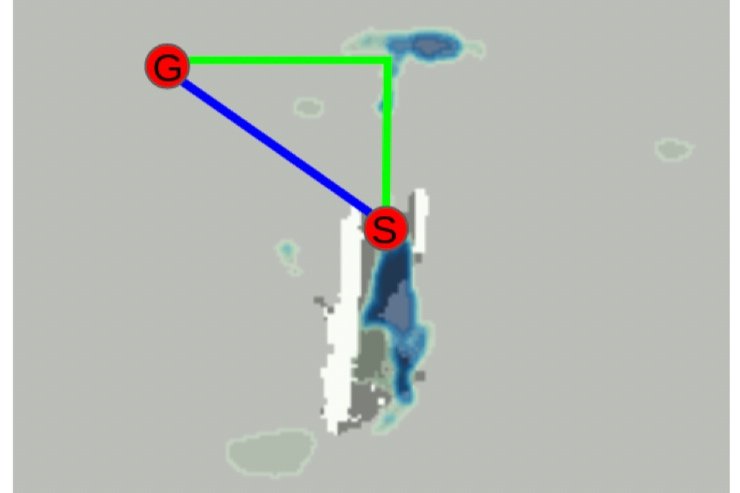
Planning in Hybrid Geometric and Object-Level Representation
We enable more efficient navigation by training a neural network to predict a sampling distribution from object-level maps and occupancy maps. [pdf][video]
Liu, K.*, Stadler, M.*, & Roy, N. Learned Sampling Distributions for Efficient Planning in Hybrid Geometric and Object-Level Representations. ICRA 2020.

Learning Gaussian Noise Models for State Estimation
Deep Inference for Covariance Estimation (DICE) uses a deep convolutional neural network to predict noise models for high dimensional, complex sensors. [pdf][video]
Liu, K.*, Ok, K.*, Vega-Brown, W., & Roy, N. Deep inference for covariance estimation: Learning gaussian noise models for state estimation. ICRA 2018.
Recursive Neural Fields
ReFiNe can encode multiple objects represented as neural fields via a recursive formulation that allows for a single latent vector to be expanded into an octree representing the object.
Zakharov, S., Liu, K., Gaidon, A., & Ambrus, R. ReFiNe: Recursive Field Networks for Cross-modal Multi-scene Representation. To appear at SIGGRAPH 2024.
Weakly Supervised Deep Object Estimation
VoluMon is a novel approach to enable a deep neural network to predict the size and pose of objects without requiring 3D annotations or mesh models [pdf, video]
Liu, K., Ok, K., & Roy, N. VoluMon: Weakly-Supervised Volumetric Monocular Estimation with Ellipsoid Representations. IROS 2021.